Tracking und Remote Followspots liegen voll im Trend. Treffen die Moving-Heads aber nicht das Ziel, sind oft ungenaue Pan-/Tilt-Werte aus den technischen Daten die Ursache. Wir zeigen, wie man selbst exakte Pan- und Tilt-Werte ermittelt.
(Bild: Herbert Bernstädt)
In der Regel braucht man nur grobe Angaben wie 560° Pan oder 640° Pan, um abzuschätzen, wie oft man einen Scheinwerfer um die Achse drehen kann. Das exakte Ausrichten findet dann mit dem Encoder auf Sicht statt und wird dann in einem Preset gespeichert. So war bisher für den Hersteller auch keine Notwendigkeit, die genaue Auflösung für Pan und Tilt anzugeben. Ob der Scheinwerfer statt 560° dann 572° oder nur 552° dreht, hat bei dieser Arbeitsweise niemand ernsthaft interessiert.
Anzeige
Heute finden aber immer mehr Trackingsysteme Einzug. Für die virtuelle Positionsberechnung im dreidimensionalen Raum ist es daher elementar, wie genau die Auflösung für Pan und Tilt angegeben wird. Gerade bei größeren Entfernungen, die meist bei einem Einsatz von Trackingsystemen vorhanden sind, zeigen diese kleinen Abweichungen große Auswirkungen. Je nach Konstruktion variieren die Movingheads ein wenig in ihrer Auflösung bei einem Wertebereich in der DMX-Ansteuerung von 16 Bit bzw. 65536 Dezimal. Die Kenntnis der exakten Pan-/Tilt-Auflösung ist auch für die Erstellung von GDTF-Files interessant, damit weitere Systeme sich daraus mit den exakten Werten bedienen können.
Da die meisten Angaben in den Datenblättern eher grob gehalten werden bzw. die Scheinwerfer selbst doch stark von den Angaben abweichen, zeigen wir im Folgenden, wie man die exakten Pan- und Tilt-Werte selber ermitteln kann.
Pan-Prüfung mit Winkelmesser
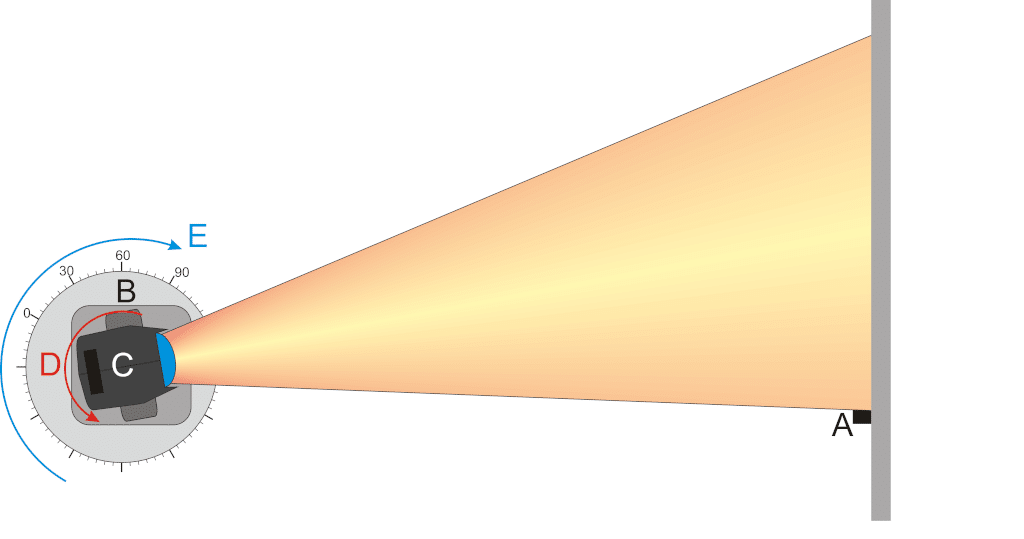
Zunächst die Grundüberlegung: Sehr exakt ist der Wertebereich zur Ansteuerung der Pan-Achse. Bei 16 Bit sind dies 216, also 65536 Schritte. Drehe ich am Encoder auf einen Anschlag wie 0 bzw. bei 2 Byte (16 Bit) auf 0 / 0, hat sich der Kopf bis zum Endanschlag bewegt. Dreht man den Encoder auf den anderen Anschlag, also auf 255 / 255 bzw. 65536 Dezimal, hat sich der Kopf in der Horizontalen meist mehr als um 360° bewegt. Würden wir nun wissen, um wieviel Grad er sich gedreht hat, könnten wir die exakte Auflösung vom Ansteuer-Schritt zur Bewegung angeben. Steht ein Drehteller (B) mit Winkelskala zur Verfügung, dann stellen wir den kopfbewegten Spot (C) darauf. Wir stellen ihn randscharf ein und projizieren mit einem Endanschlag 0 horizontal auf eine Wand. Wir markieren einen Rand (A, z.B. den linken äußeren Rand) in der Horizontalen des Lichtkegels. Nun bewegen wir den Scheinwerfer mittels Lichtstellpult auf den anderen Anschlag von 255/255 Dez (D). Er leuchtet naturgemäß irgendwo im Raum hin. Dort nullen wir den Drehteller oder notieren uns den Winkelwert.
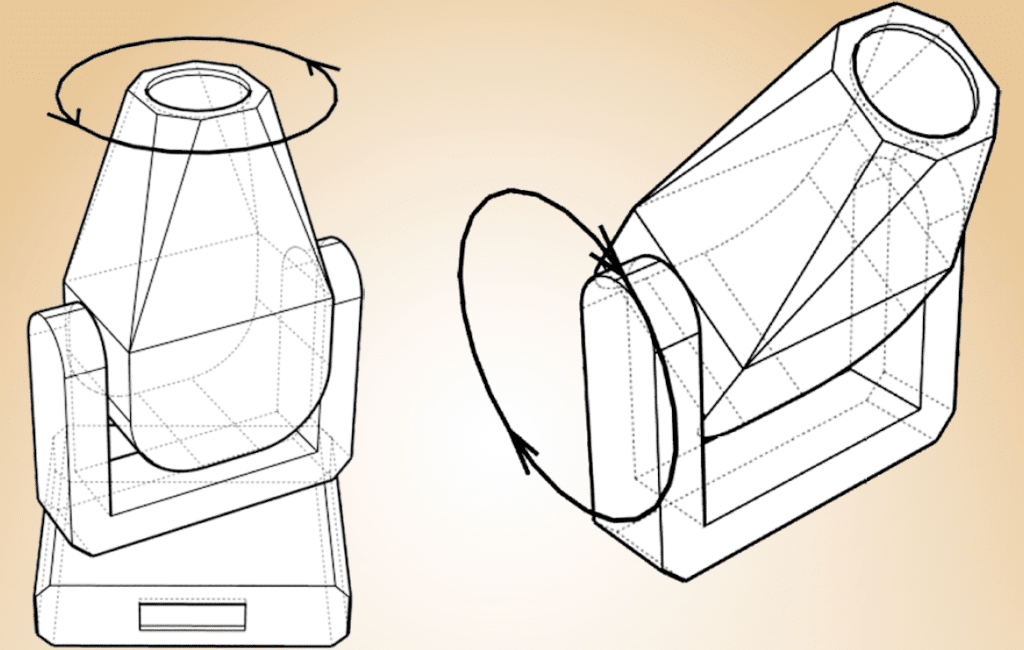
Mit Winkelmesser Exakte Auflösung der Pan-Achse A) Markierung für den Rand des Lichtkegels B) Drehteller C) Movinghead D) Rotation Pan (über Lichtstellpult) E) Rotation am Drehteller (Bild: Herbert Bernstädt)
Nun bewegen wir den Scheinwerfer nicht mit dem Lichtstellpult, sondern mit dem Drehteller so lange zurück (E), bis der Scheinwerfer mit dem Rand seines Lichtkegels die Markierung erreicht, die bei der 0-Position eingestellt wurde. Natürlich muss man bei einer 560°-Grobangabe nicht die gesamten Kreise zurückdrehen. Hier reicht es, in die gleich Richtung zurückzudrehen, bis der Rand erreicht ist und die übersprungene Runde von 360° wird einfach hinzugezählt.
Exakte Auflösung der Tilt-Achse A) Markierung für den Rand des Lichtkegels B) Pan-Achse C) Movinghead D) Rotation Tilt – Ausrichten auf Markierung (Bild: Herbert Bernstädt)
Nun hat man die Gradzahl (bzw. die Differenz, wenn man ihn nicht genullt hat) vom Drehteller, um die Randmarkierung zu erreichten. Damit weiß man, wie weit sich der Scheinwerfer bei einer Ansteuerung von 0 bis 255/255 real dreht – beispielsweise um 545,5° und nicht wie meist im Datenblatt angegeben 560°.
Tilt-Bestimmung ohne Winkelmesser
Mit Winkelmesser ist die Pan-Ermittlung recht einfach zu realisieren. Aber was machen wir mit dem Tilt? Besonders, wenn wir keine Drehscheibe zur Verfügung haben oder diese nur umständlich einzusetzen ist (wie eben beim Tilt)?
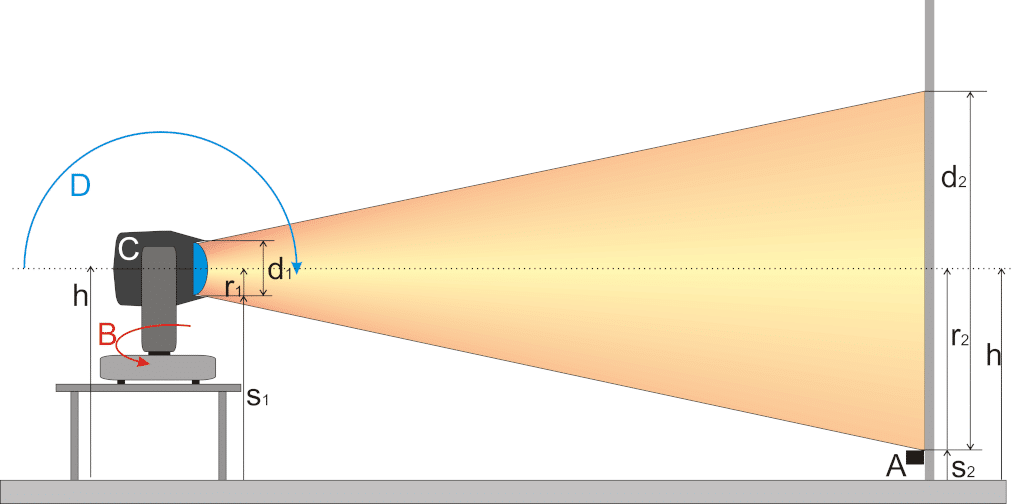
Auch hier gibt es eine Lösung, die auf dem obigen Prinzip aufbaut. Hier richten wir den Scheinwerfer zunächst waagerecht aus, indem wir den Scheinwerfer (C) waagerecht stellen (nicht nur nach Augenmaß, denn wir brauchen die exakten Werte). Um den Scheinwerfer waagerecht auszurichten, messen wir zunächst die Austrittshöhe des Lichtzentrums des Scheinwerfers an der Linse. Um die exakte Höhe des Lichtaustrittsmittelpunktes zu ermitteln, misst man einfach den Durchmesser der Linse (d1) bzw. den Rahmen der Linse und teilt diesen durch zwei, was den Radius (r1) ergibt. Dann braucht man nur noch die Höhe des Rahmens bzw. des Linsenrandes von der Bezugsebene, z.B. dem Boden, zu messen und den Radius zu addieren (h = s1 + r1).
Am Drehteller B. Eng. Elektrotechnik Bastian Ernst, zuständig für photometrische Messtechnik als R&D Engineer bei Adam Hall (Bild: Herbert Bernstädt)
Um nun den Scheinwerfer mit dem Tilt-Encoder waagerecht auszurichten, benötigen wir das Lichtzentrum in der gleichen Höhe (h) auf der Wand, wo die Lichtprojektion auftrifft. Auch hier messen wir den Durchmesser des scharfen Lichtkegels (d2), um den Radius des Lichtkegels (r2) zu bestimmen. Nimmt man die untere scharfe Kante der Projektion zur waagerechten Ausrichtung (A), so braucht man nur den Radius des projizierten Lichtkegels vom zuvor ermittelten Lichtzentrum des Scheinwerfers abzuziehen, um die Kante genau auf diese Höhe zu bringen (s2 = h – r2). Damit wäre der Scheinwerfer genau waagerecht ausgerichtet. Man notiert nun den Tilt-DMX-Wert, praktischerweise in Form einer 16-Bit-Dezimalanzeige.
Nun drehen wir den Pan um 180 Grad (B) und schwenken den Tilt (D) wieder genau auf diese Höhe bzw. Markierung. Damit haben wir nach einem Flip genau wieder eine horizontale Ausrichtung erreicht. Jetzt müssen wir nur noch ablesen, wie weit wir den Tilt des Pultes verändern mussten, um die gleiche Ausrichtung zu erreichen. Damit haben wir den genauen DMX-Stellwert für 180° Tilt ermittelt. Der Rest ist wie immer Dreisatzrechnung. DMX-Stellwert von 42477 Dez. für 180° folgt pro DMX-Schritt werden 0,004237 Grad bewegt. Somit ergibt sich bei einem Wertevorrat von 65536 Schritten eine Tiltauslenkung von 277,71 Grad, die wir nun wie beim PAN in den Datensatz eintragen können.
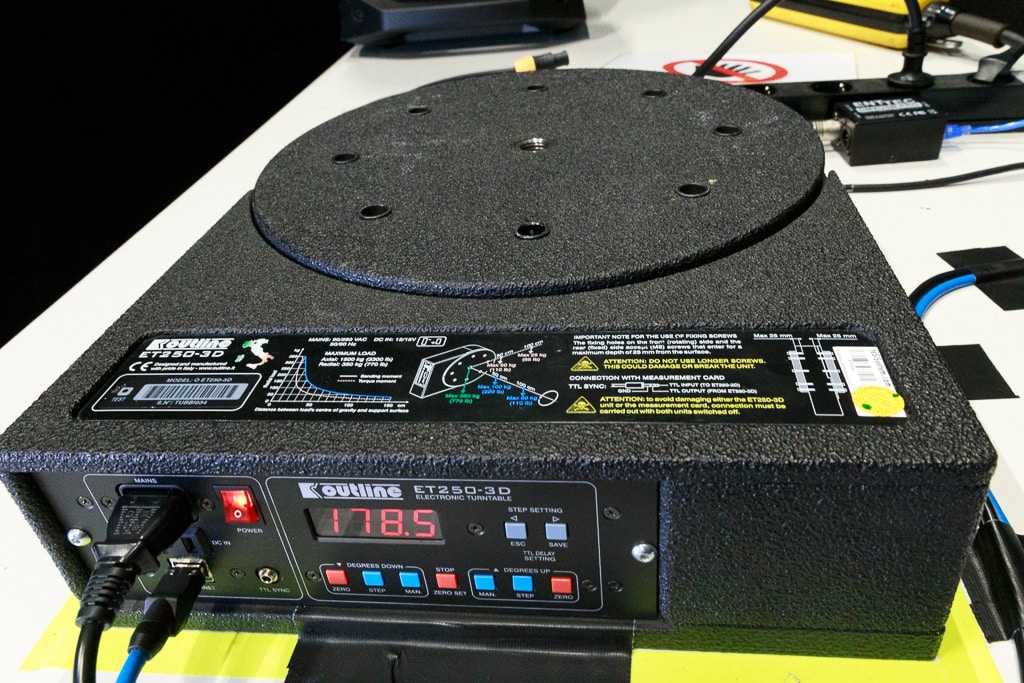
Weit verbreitet motorisierter und exakt steuerbarer Drehteller (Bild: Herbert Bernstädt)
Noch ein Tip für Movingheads ohne scharfen Rand (Washlights), wobei Washlights aufgrund ihres unscharfen Randes nicht so exakt ausgerichtet werden müssen: Man könnte auch einen Laserpointer auf den Kopf kleben und hat dann auch die Möglichkeit der exakten Ausrichtung.